| Téléopération |
||
| En bref |
 |
|
| Acronyme du projet: | Teleoperation | |
| Chef de projet: | Roland Scherwey |
|
| Domaines: | Automatisation ; Jumeau numérique ; Projets phares |
|
| Financement: |
Nouvelle Politique Régionale (NPR) FR Partenaires |
|
| Durée du projet: |
Juin 2020 - Avril 2021 | |
| Partenaires: | Berner Fachhochschule BFH CertX SA CFF SA Cluster Food & Nutrition CarPostal SA Dynamic Test Center DTC Haute école d'ingénierie et d'architecture de Fribourg HEIA-FR Haute école de gestion de Fribourg HEG-FR RUAG Suisse SA Transports publics fribourgeois Trafic (TPF TRAFIC) SA Université de Fribourg UNIFR |
|
| Description du projet |
|
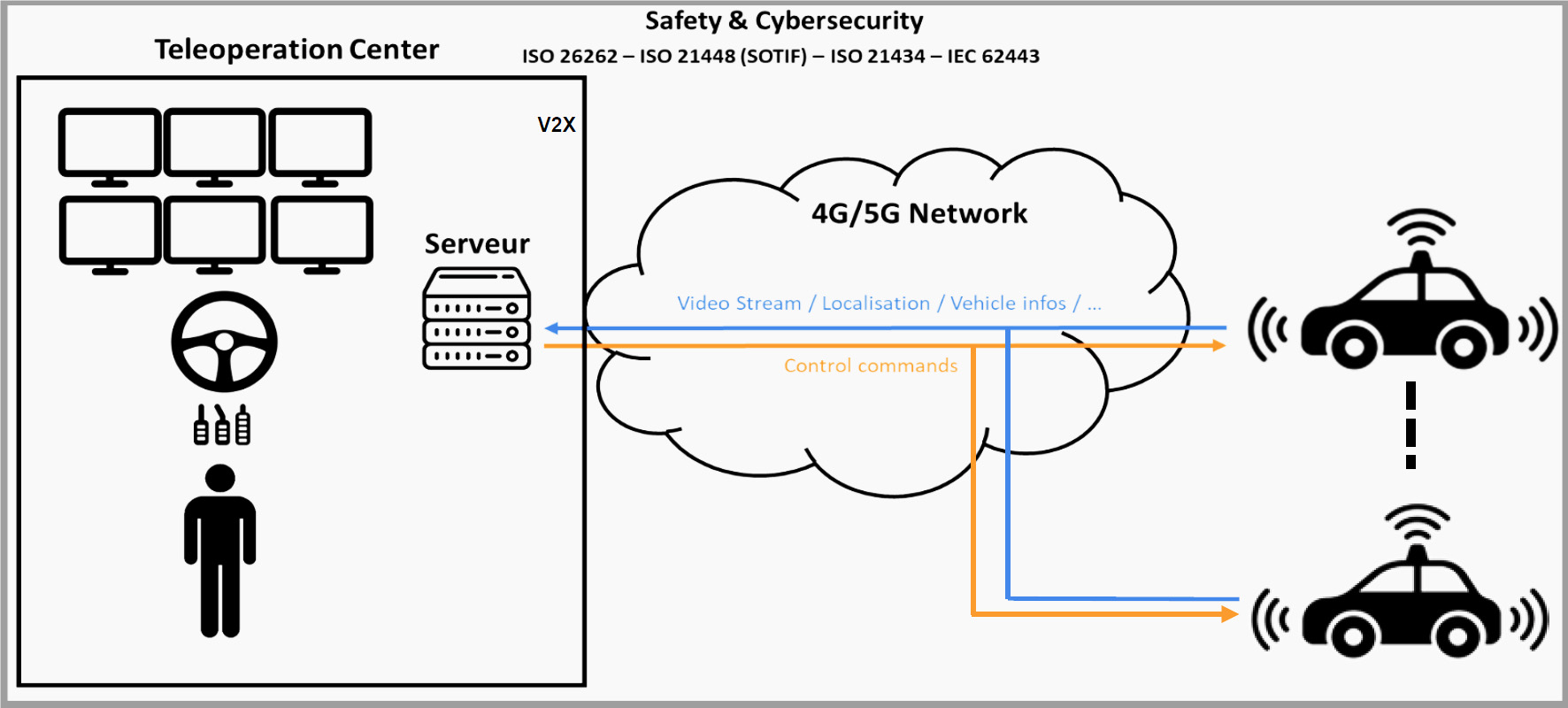
Développement et mise en place d’un concept de téléopération centralisée permettant de piloter à distance des véhicules automatisés et connectés sur la base des exigences de sûreté et de cybersécurité À ce jour, plusieurs opérateurs de transports publics ont réalisé des tests relatifs aux véhicules automatisés en Suisse. Si ces tests ont certainement permis à chaque opérateur d'acquérir un savoir-faire technique, opérationnel et organisationnel précieux, cette approche individualiste et coûteuse semble avoir atteint un seuil de rentabilité. Une solution coordonnée et évolutive pour mettre en œuvre avec succès une mobilité efficace au niveau national fait actuellement défaut. Étant donné qu’en Suisse, le transport public joue un rôle majeur pour la mobilité, il est primordial d’unir les forces dans ce domaine. D'un point de vue économique, l'opération de navettes automatisées dans le secteur des transports publics n'aura guère d'avenir si l'on n’arrive pas, dans un premier temps, à remplacer le conducteur d'un véhicule par un pilote à distance qui opère plusieurs véhicules par téléopération. Cette substitution permettra de réduire les frais d'exploitation et créera un intérêt économique à opérer des navettes automatisées par exemple pour des lignes de transport non rentables qui sont peu desservies. D'un point de vue technique, le défi consiste à développer un système de téléopération centralisée tout en assurant la sûreté de fonctionnement et la sécurité des personnes. Démontrer la faisabilité technique d'un système de téléopération centralisée pour piloter à distance des véhicules automatisés transportant, dans un premier temps, des marchandises et, plus tard, des personnes est l’enjeu du projet. Les résultats délivrés sont une analyse de rentabilisation et d'acceptabilité sociale de la téléopération, un concept technique d’un système de téléopération, l’identification des fonctions de sécurité nécessaires au fonctionnement à distance, les réglages et configurations du véhicule automatisé ainsi que les critères de vérification, validation et homologation d’un système de téléopération. |
| Infos supplémentaires |
| Poster |
| Fiche descriptive |
| vidéo |
| Contact SwissMoves |
| Prof. Roland Scherwey |